O campo da compreensão em 3D tem atraído atenção crescente nos últimos tempos, impulsionado significativamente pelas tecnologias de AR e Computação Espacial, apoiadas por grandes empresas como Apple e Meta.
No centro deste fascinante campo está a visão computacional em 3D, um ramo especializado da visão computacional que foca em compreender e processar dados visuais tridimensionais do mundo real.
Este artigo apresenta o processamento de nuvens de pontos 3D usando a biblioteca Open3D, uma biblioteca open-source projetada para capacitar desenvolvedores e pesquisadores com um conjunto abrangente de ferramentas para processamento de dados em 3D. Todos esses conceitos serão explorados através de exemplos práticos em Python, proporcionando uma base sólida para explorar e aplicar habilidades de processamento de dados 3D.
Código do Artigo
Acesse o código-fonte deste artigo gratuitamente.
Informe seu email para acessar o código:
✓ Seu código está pronto!
Abrir no Google Colab →Open3D: Uma Biblioteca Moderna para Processamento de Dados 3D
O Open3D está na vanguarda da tecnologia de processamento de dados 3D, oferecendo uma biblioteca open-source que acelera significativamente o desenvolvimento de softwares focados no manuseio de dados 3D. Projetado com uma API clara e intuitiva, o Open3D oferece aos desenvolvedores e pesquisadores acesso fácil a um conjunto robusto de estruturas de dados e algoritmos para computação em 3D, tanto em C++ quanto em Python.
As principais funcionalidades do Open3D são cuidadosamente projetadas para cobrir todos os aspectos do manuseio de dados 3D, incluindo suporte abrangente para estruturas de dados 3D e algoritmos de processamento, essenciais para tarefas como reconstrução de cenas, alinhamento de superfícies e visualização 3D.
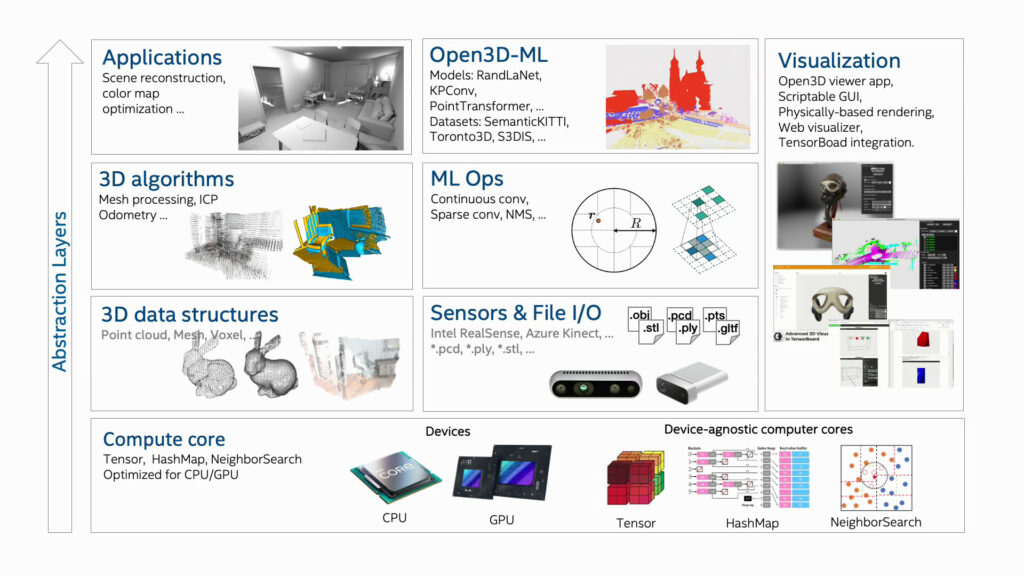
Além disso, a biblioteca vai além das capacidades tradicionais de processamento ao oferecer renderização baseada em física (PBR), que adiciona uma camada de realismo aos modelos 3D, e suporte para machine learning em 3D, permitindo integração com frameworks populares como PyTorch e TensorFlow.
O suporte do Open3D para aceleração por GPU melhora significativamente a eficiência das operações principais em 3D, beneficiando aplicações que requerem processamento e visualização em tempo real de dados 3D, como experiências interativas de AR/VR, robótica e navegação de veículos autônomos.
Métodos de Representação de Formas 3D
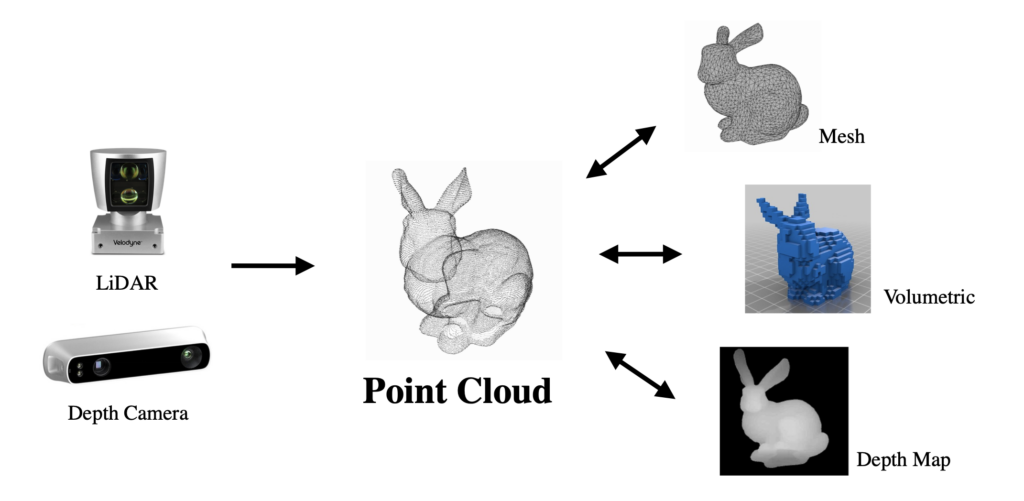
No processamento de dados 3D, as formas podem ser representadas de duas maneiras principais: formas rasterizadas e formas geométricas.
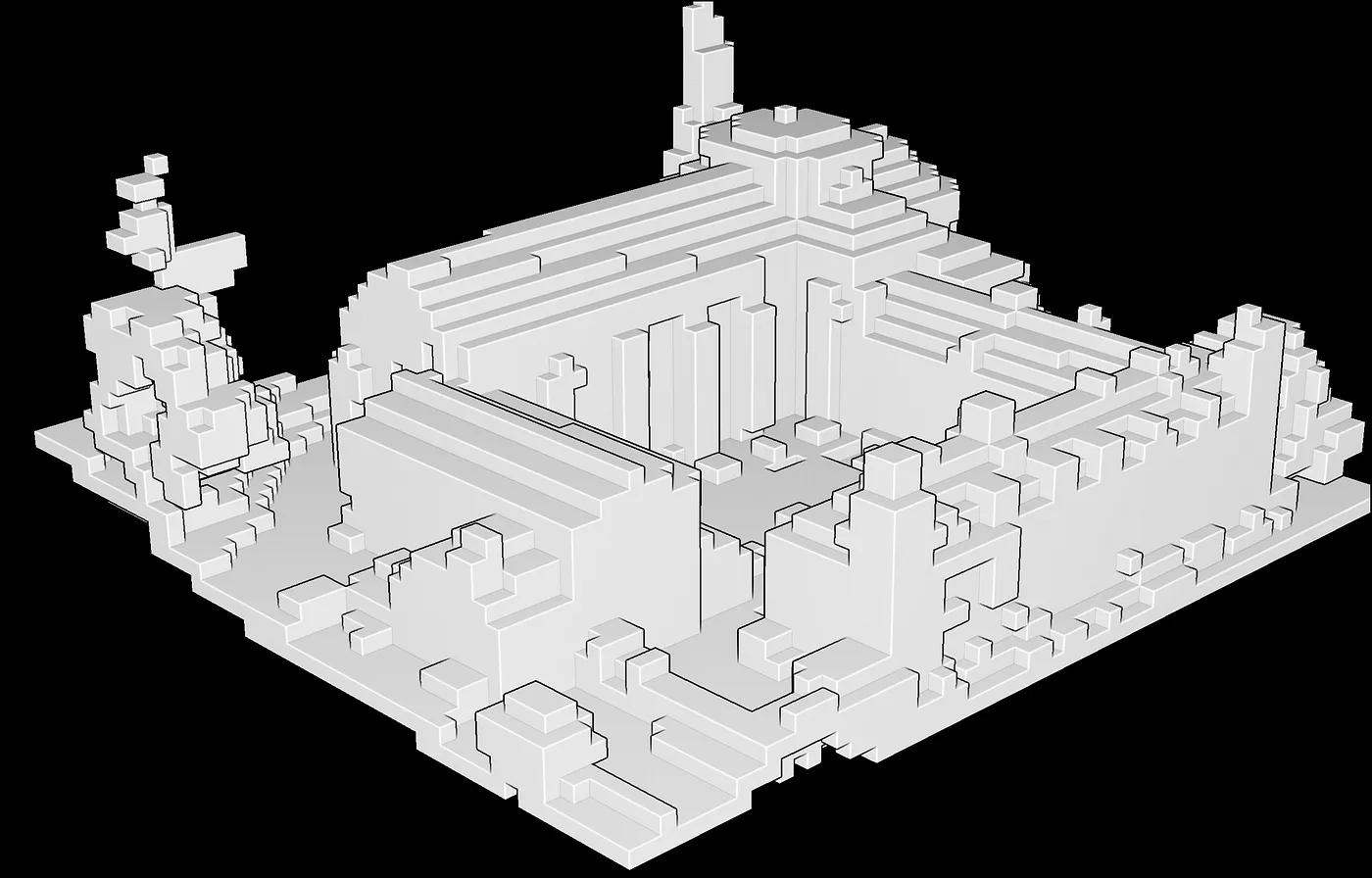
Representações rasterizadas utilizam grades regulares e incluem imagens multivista, mapas de profundidade e dados volumétricos. Imagens multivista capturam objetos de vários ângulos, mapas de profundidade registram a distância de um ponto de vista até a superfície do objeto, e representações volumétricas utilizam uma grade de voxels para modelar objetos no espaço 3D.
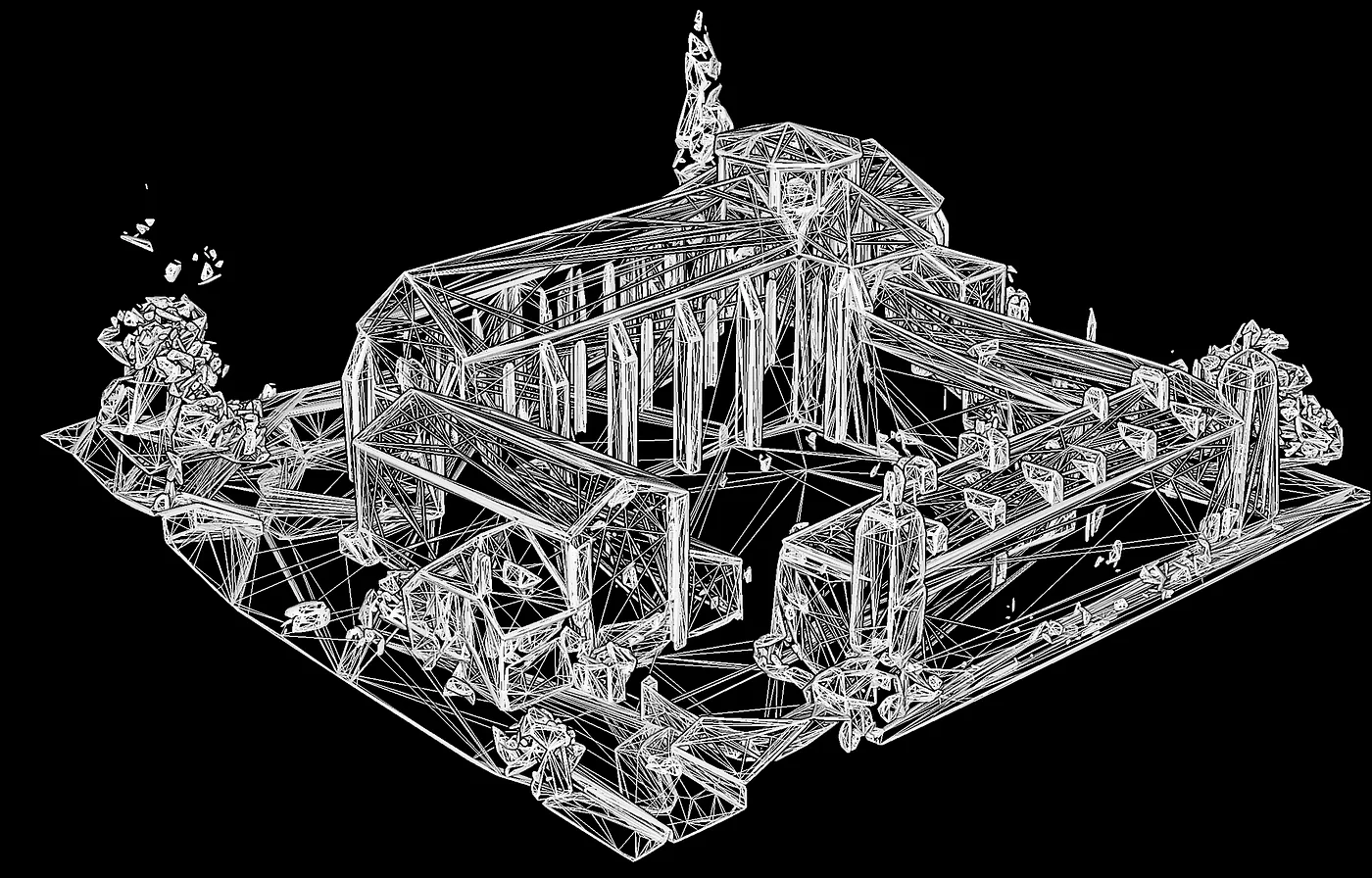
Por outro lado, representações geométricas modelam formas através de elementos irregulares e discretos. Essa categoria inclui malhas poligonais, compostas por vértices, arestas e faces; nuvens de pontos, que são conjuntos de vértices em um sistema de coordenadas tridimensional; e modelos CAD baseados em primitivas, que utilizam formas geométricas básicas (como esferas, cubos e cilindros) para construir objetos complexos.
Cada tipo de representação possui aplicações e vantagens específicas, com as formas rasterizadas sendo úteis para reconstrução 3D baseada em imagens, enquanto as formas geométricas oferecem maior precisão em modelagem e simulação.

Fundamentos Teóricos das Nuvens de Pontos
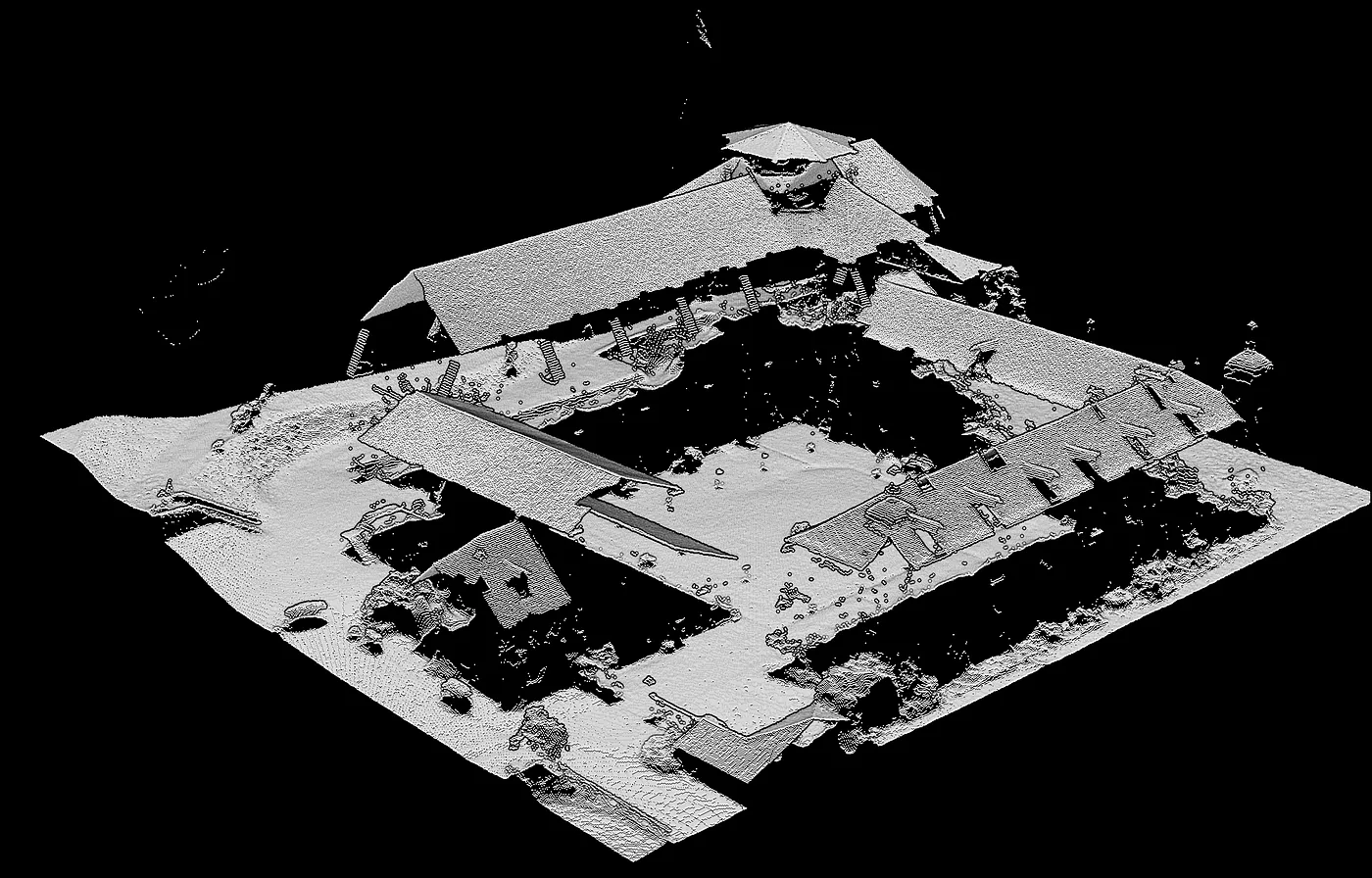
Nuvens de pontos são uma forma fundamental de representação de superfícies, capturando a essência dos objetos em forma de pontos discretos distribuídos por suas superfícies. Matematicamente, uma nuvem de pontos pode ser definida como um conjunto  , onde cada
, onde cada  representa um ponto no espaço tridimensional com coordenadas que correspondem à sua posição.
representa um ponto no espaço tridimensional com coordenadas que correspondem à sua posição.
Essa simplicidade permite a aquisição direta de dados espaciais do ambiente, tornando as nuvens de pontos uma ferramenta indispensável em áreas como visão computacional, gráficos por computador e robótica. A proliferação de sensores 3D acessíveis tornou os dados de nuvens de pontos mais democratizados, permitindo uma ampla gama de aplicações, desde mapeamento detalhado do ambiente até tarefas complexas de reconhecimento de objetos.
Os algoritmos projetados para processamento de nuvens de pontos frequentemente dependem de relações espaciais e variações de densidade dentro dos dados para inferir propriedades de superfícies e limites de objetos. Técnicas como a construção de uma árvore k-d para busca eficiente dos vizinhos mais próximos ou a aplicação de algoritmos de reconstrução de superfícies, como reconstrução de Poisson ou formas alfa, são comumente empregadas para derivar interpretações significativas a partir dos dados brutos da nuvem de pontos.
Apesar de sua simplicidade, as nuvens de pontos encapsulam um rico conjunto de informações sobre a geometria e a topologia de objetos físicos, servindo como uma ponte crítica entre os mundos digital e físico em diversos domínios tecnológicos.
Início Rápido com Python e Open3D
Nesta seção, exploraremos os fundamentos do uso do Open3D, uma poderosa biblioteca para processamento de dados 3D, com foco na visualização de nuvens de pontos. O Open3D simplifica a manipulação e a visualização de dados 3D, tornando-o acessível para desenvolvedores que trabalham em diferentes plataformas, como Ubuntu, macOS e Windows, com versões do Python de 3.8 a 3.11.
Instalação e Verificação
Para começar a usar o Open3D, você pode instalá-lo utilizando o comando pip. Existem duas opções de instalação disponíveis: uma instalação padrão e uma versão apenas para CPU em sistemas Linux x86_64, que é menor e pode ser preferida em ambientes sem GPU dedicada.
pip install open3d # Instalação padrão pip install open3d-cpu # Versão apenas para CPU em Linux
Após a instalação, é uma boa prática verificar se o Open3D foi instalado corretamente, checando sua versão. Isso pode ser feito com um comando simples em Python.
python -c "import open3d as o3d; print(o3d.__version__)"
O Open3D também oferece uma API Python para processamento e visualização de dados 3D, além de uma interface de linha de comando (CLI) para executar exemplos predefinidos.
Visualizando uma Nuvem de Pontos
O núcleo deste tutorial foca em carregar e visualizar uma nuvem de pontos utilizando o Open3D. O processo começa com o carregamento de um arquivo de nuvem de pontos no formato .ply, um formato popular para armazenar dados 3D. O método read_point_cloud é utilizado para esta finalidade, decodificando automaticamente o arquivo com base em sua extensão.
import open3d as o3d
import numpy as np
# Carregando e visualizando uma nuvem de pontos em formato PLY
print("Carregando uma nuvem de pontos PLY, imprimindo e renderizando...")
ply_point_cloud = o3d.data.PLYPointCloud()
pcd = o3d.io.read_point_cloud(ply_point_cloud.path)
# Imprimindo informações sobre a nuvem de pontos e o array de pontos
print(pcd)
print(np.asarray(pcd.points))
# Definindo parâmetros de visualização
view_params = {
"zoom": 0.3412,
"front": [0.4257, -0.2125, -0.8795],
"lookat": [2.6172, 2.0475, 1.532],
"up": [-0.0694, -0.9768, 0.2024]
}
# Renderizando a nuvem de pontos
o3d.visualization.draw_geometries([pcd], **view_params)
Após carregar a nuvem de pontos, podemos inspecioná-la imprimindo o objeto pcd e o array de pontos contido nela. Isso oferece uma visão da estrutura e dos dados presentes na nuvem de pontos. A visualização é realizada pela função draw_geometries, que renderiza a nuvem de pontos em uma janela, permitindo que os usuários interajam com os dados 3D. Esses parâmetros ajudam a ajustar a perspectiva da câmera, oferecendo uma visão detalhada da estrutura dos dados após a simplificação.
A visualização pode dar a impressão de uma superfície densa; no entanto, é importante lembrar que o que estamos vendo é uma nuvem de pontos renderizada como surfels. A interface gráfica do Open3D oferece funcionalidades adicionais, como o ajuste do tamanho dos pontos através de atalhos de teclado, melhorando a experiência de visualização. Por exemplo, pressionar a tecla - diminui o tamanho dos pontos, oferecendo uma perspectiva diferente dos dados.
Redução de Pontos com Voxel (Voxel Downsampling)
Esse processo aplica uma grade de voxels para reduzir uniformemente a densidade da nuvem de pontos de entrada, simplificando os dados para maior eficiência computacional nas etapas de processamento subsequentes. O método funciona agrupando pontos em voxels e, em seguida, calculando a média dos pontos dentro de cada voxel para uma única localização.
Isso reduz o número de pontos, mantendo a forma e as características gerais da nuvem de pontos original.
print("Reduzindo a nuvem de pontos com um tamanho de voxel de 0.05")
# Aplicando a redução de pontos com voxel
downpcd = pcd.voxel_down_sample(voxel_size=0.05)
# Definindo parâmetros de visualização para a nuvem de pontos reduzida
downsample_view_params = {
"zoom": 0.3412,
"front": [0.4257, -0.2125, -0.8795],
"lookat": [2.6172, 2.0475, 1.532],
"up": [-0.0694, -0.9768, 0.2024]
}
# Renderizando a nuvem de pontos reduzida
o3d.visualization.draw_geometries([downpcd], **downsample_view_params)
No trecho de código sobre a redução de pontos com voxel, o processo começa especificando um tamanho de voxel de 0.05, que determina a resolução da grade de voxels. A função voxel_down_sample é chamada na nuvem de pontos original pcd, reduzindo sua densidade ao calcular a média dos pontos dentro de cada voxel. Isso resulta em downpcd, uma versão simplificada da nuvem de pontos original.
A função o3d.visualization.draw_geometries é utilizada para visualizar downpcd. Parâmetros como zoom, front, lookat e up são configurados para ajustar o ângulo e a posição da câmera, proporcionando uma visualização clara da nuvem de pontos reduzida.
Estimação de Normais dos Vértices
A estimação de normais dos vértices calcula as normais para cada ponto na nuvem de pontos, algo essencial para muitas tarefas de processamento 3D. A visualização das normais pode ser ativada pressionando a tecla N, e seu comprimento pode ser ajustado com as teclas - e +. Essa função calcula as normais identificando pontos adjacentes e utilizando a análise de covariância para encontrar o eixo principal.
Uma instância de KDTreeSearchParamHybrid, que especifica um raio de busca e o número máximo de vizinhos próximos, controla o nível de detalhe da estimação das normais para equilibrar precisão e carga computacional.
print("Recalculando as normais para a nuvem de pontos reduzida")
# Estimando normais para a nuvem de pontos reduzida
downpcd.estimate_normals(
search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30))
# Definindo parâmetros de visualização para exibir as normais
normals_view_params = {
"zoom": 0.3412,
"front": [0.4257, -0.2125, -0.8795],
"lookat": [2.6172, 2.0475, 1.532],
"up": [-0.0694, -0.9768, 0.2024],
"point_show_normal": True
}
# Renderizando a nuvem de pontos reduzida com normais
o3d.visualization.draw_geometries([downpcd], **normals_view_params)
No código de estimação de normais dos vértices, a operação começa chamando a função estimate_normals na nuvem de pontos reduzida downpcd. Essa função calcula as normais para cada ponto, o que é crucial para muitas tarefas de processamento 3D, como renderização, simulação e análises geométricas.
O argumento search_param especifica como as normais serão calculadas, utilizando uma árvore KD (k-d tree) para encontrar eficientemente pontos próximos.
Aqui, o3d.geometry.KDTreeSearchParamHybrid é configurado com um radius de 0,1 e max_nn (máximo de vizinhos próximos) de 30. Essa configuração equilibra a precisão da estimação de normais com a eficiência computacional, limitando a busca a um raio de 10 cm e considerando até 30 vizinhos para cada ponto.
Após o cálculo das normais, a função o3d.visualization.draw_geometries visualiza a nuvem de pontos reduzida com as normais habilitadas.
Takeaways
- Papel do Open3D: O Open3D é uma biblioteca essencial para o processamento de dados 3D, permitindo a manipulação de dados complexos em 3D com suporte para C++ e Python. Ele facilita uma variedade de aplicações, desde visão computacional 3D até AR/VR e robótica.
- Representação de Formas 3D: O artigo explica as formas rasterizadas e geométricas como os dois métodos principais para representar formas 3D. As formas rasterizadas incluem imagens multivista e dados volumétricos, enquanto as formas geométricas abrangem malhas poligonais e nuvens de pontos.
- Fundamentos das Nuvens de Pontos: Nuvens de pontos servem como uma forma simples, mas informativa, de representação de superfícies, sendo essenciais para tarefas como mapeamento ambiental e reconhecimento de objetos. O artigo cobre a definição matemática das nuvens de pontos e sua importância em visão computacional e robótica.
- Guia Rápido com Python: Um guia rápido para começar a usar o Open3D com Python é fornecido, incluindo instruções de instalação e operações básicas, como carregar, visualizar e reduzir nuvens de pontos, oferecendo uma introdução prática às capacidades do Open3D.
- Uso Prático do Open3D: Demonstrando a utilidade do Open3D, o artigo fornece exemplos em Python para tarefas como visualização de nuvens de pontos, redução de pontos com voxel e estimação de normais dos vértices. Esses exemplos destacam a funcionalidade do Open3D no processamento e visualização de dados 3D.
Compreender e processar nuvens de pontos é crucial para diversas aplicações, e dentro do contexto da Visão Computacional 3D, a biblioteca Open3D oferece as ferramentas necessárias para essas tarefas. Se você quer ver como representações baseadas em pontos estão sendo usadas para reconstrução 3D fotorrealista, confira o artigo sobre Gaussian Splatting e reconstrução 3D em tempo real. Se você achou este post informativo, não deixe de curtir, comentar e compartilhar para apoiar e disseminar o conhecimento.